有限公司")

手 機:139-2581-2062
郵 箱:market@sj-technol.com
電 話:0769-89136906
網(wǎng) 址:http://www.yjk2006.com/
地 址:廣東省東莞市松山湖國際創(chuàng)新創(chuàng)業(yè)社區(qū)A1棟
應(yīng)變傳感器可將機械變形轉(zhuǎn)化為可探測的電學(xué)信號,在智能機器人、醫(yī)療監(jiān)測、人機交互界面及仿生假肢等領(lǐng)域都展現(xiàn)出良好的應(yīng)用前景。特別是針對人體運動行為的實時監(jiān)測可以有效地評估其健康狀況,在可穿戴醫(yī)療診斷和個人健康監(jiān)測中具有重要意義。
對于人體運動監(jiān)測,理想的應(yīng)變傳感器件須兼具高拉伸率和良好的穩(wěn)定性,從而為實現(xiàn)全尺度人體運動檢測提供可能。此外,由于人體運動具有多樣性和復(fù)雜性,應(yīng)變傳感器在不同應(yīng)用條件下(溫度,頻率等)的穩(wěn)定性同樣重要。而目前所報道的柔性應(yīng)變傳感器往往不能同時具備以上性能,使其應(yīng)用范圍受限。
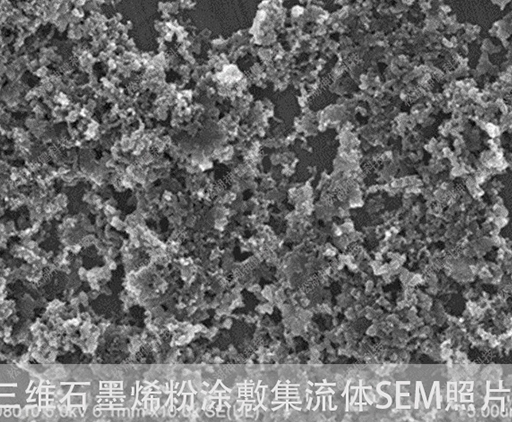
華中科技大學(xué)徐鳴教授課題組研發(fā)出一種基于 “滑動變阻器”工作原理的三維石墨烯柔性可拉伸應(yīng)變傳感器;通過改變相鄰三維石墨烯片層之間的接觸面積,產(chǎn)生電阻變化,該傳感器具有高拉伸率(70%),優(yōu)異的循環(huán)穩(wěn)定性(300,000次),并在0.1-5 Hz的頻率區(qū)間及-45 °C-180 °C的溫度區(qū)間內(nèi)保持穩(wěn)定響應(yīng),實現(xiàn)了全尺度人體運動監(jiān)測。
研究人員將三維石墨烯為基本結(jié)構(gòu)單元,采用化學(xué)還原法并輔以對還原時間的控制合成了部分搭接的三維三維石墨烯網(wǎng)絡(luò),并將其與彈性聚合物復(fù)合獲得柔性可拉伸應(yīng)變傳感器。通過原位透射電鏡觀察發(fā)現(xiàn),相互搭接的三維石墨烯片層在外力作用下產(chǎn)生相對滑移,其接觸面積也隨之改變,從而產(chǎn)生電阻變化。

聯(lián)系電話:0769-89136906
郵箱:market@sj-technol.com
傳真:0769-89136906
地址:廣東省東莞市松山湖國際創(chuàng) 新創(chuàng)業(yè)社區(qū)A1棟
系方式")

